【科普时间到】——你不了解的激光雷达技术,快戳这里!
发布时间: | 来源:OSA西光所分会 | 【 大 中 小 】 | 【打印】 【关闭】
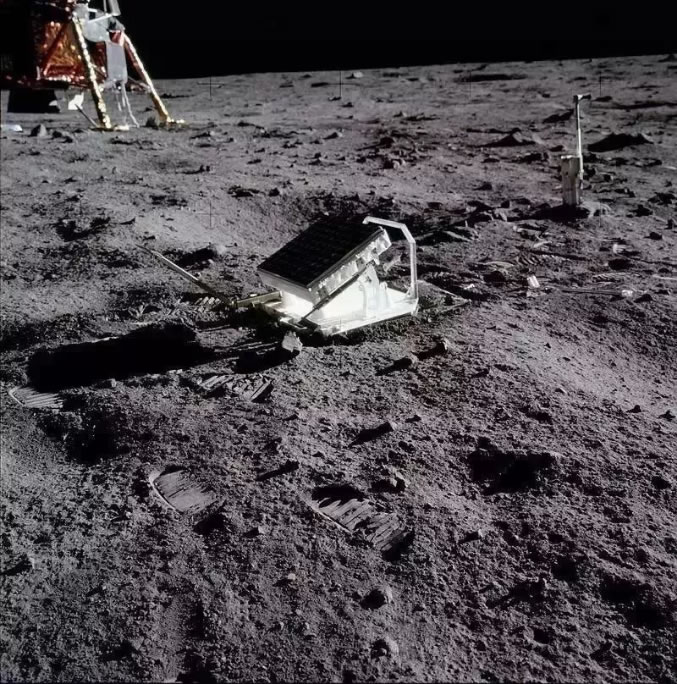
近年来,一个叫激光雷达的家伙进入了测绘各个领域,很多人对它感觉很陌生,其实不然,他可是老家伙了,我们所熟知的地球与月亮的距离,就是通过激光测距技术实现的。激光测距的原理很简单,就是通过测量激光从发射到月面反射光到达地球的时间,乘以光速再除以二,就是地月距离了。
为了保障激光能够很好地反射回来,登月的美国人特地在月球上放置了这样一面反射镜,以保障激光很好地反射回来。
随着GPS和IMU(惯性导航技术)的发展,使精确的即时定位、定姿成为可能,很多厂商发现,这家伙用来干测绘非常适合,所以近年来激光雷达就被推到了各位的面前。有人看见激光雷达,心中会冒出来一个疑惑:
“激光雷达和雷达有什么区别?”
激光雷达是雷达么?
答案:是!
不信我们看下图:
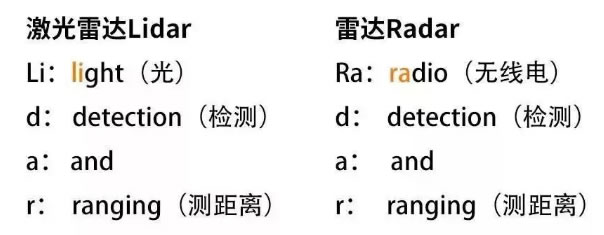
他们的区别就和名字一样简单易懂,激光雷达就是,发射激光的雷达。在原理上基本类似,只是激光雷达发射的是一条直线的光束,而雷达发射出去的是一个锥状的电磁波波束。
激光雷达的种类
目前,激光雷达的种类很多,但是按照现代的激光雷达的概念,常分为以下几种:
按激光波段分:有紫外激光雷达、可见激光雷达和红外激光雷达。
按激光介质分:有气体激光雷达、固体激光雷达、半导体激光雷达和二极管激光泵浦固体激光雷达等。
按激光发射波形分:有脉冲激光雷达、连续波激光雷达和混合型激光雷达等。
按显示方式分:有模拟或数字显示激光雷达和成像激光雷达。
按运载平台分:有地基固定式激光雷达、车载激光雷达、机载激光雷达、船载激光雷达、星载激光雷达、弹载激光雷达和手持式激光雷达等。
按功能分:有激光测距雷达、激光测速雷达、激光测角雷达和跟踪雷达、激光成像雷达,激光目标指示器和生物激光雷达等。
按用途分:有激光测距仪、靶场激光雷达、火控激光雷达、跟踪识别激光雷达、多功能战术激光雷达、侦毒激光雷达、导航激光雷达、气象激光雷达、侦毒和大气监测激光雷达等。
在具体应用时,激光雷达既可单独使用,也能够同微波雷达,可见光电视、红外电视或微光电视等成像设备组合使用,使得系统既能搜索到远距离目标,又能实现对目标的精密跟踪。
接下来我们着重聊一下测绘激光雷达
它是将激光传感器、GNSS、IMU和相机集成在一起的一个系统,通过各个传感器的参数标定,可以精确计算出传感器之间的位置偏差,以及不同坐标系间转换所用到的旋转角,从而将获取的点云数据的相对坐标转换成大地坐标。
总之可以边走边扫,而且扫出来的点全是大地坐标!就是这么炫酷。
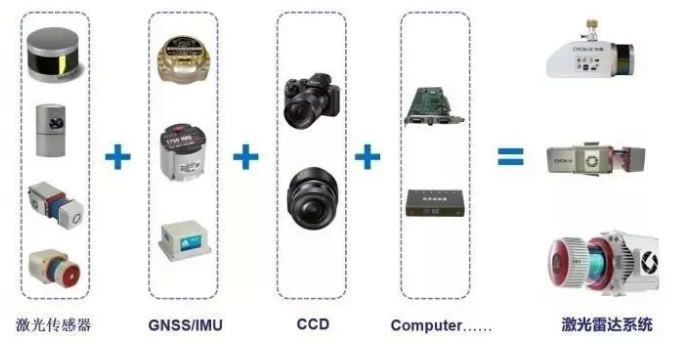 测量型激光雷达系统组成
测量型激光雷达系统组成
在使用激光雷达做测绘时,我们一般可以采用汽车、无人机、有人机等移动平台作为载体,将移动中的激光原始数据、GNSS数据、IMU数据,后期通过Post-processing模式的后处理得到厘米级精度POS数据,基于POS和原始激光数据生成我们常常看到的激光点云成果。
 机载彩色点云
机载彩色点云
 车载彩色点云
车载彩色点云
那么各搭载平台间有什么差异,该如何选择?
追求效率直接装到直升机或者固定翼飞机上!测量效率直接拉满,但由于直升机或固定翼飞的较高,所以精度就差一些,一般在10CM左右,做大面积地形测绘可选取这种手段。
 直升机搭载激光雷达
直升机搭载激光雷达
测区适合飞行,且对精度有要求,就用旋翼无人机。
使用旋翼无人机效率略逊于固定翼无人机,但在精度控制方面更能得心应手,可以达到5cm精度。机载激光雷达是一种万金油的组合,无论何种地形都能一显身手。
 旋翼无人机作业模式
旋翼无人机作业模式
特定城区或者街道环境,选用车载模式。
激光雷达车载模式,只能扫描道路两边200米内的数据,扫描区域受限,一般道路改扩建项目或者带状地形图项目可以使用此种作业模式,100米内的精度在5cm。
 车载作业模式
车载作业模式
背包作为补充手段,填补最后的空白。由于我们是多平台激光雷达,甚至可以背在背上进行测量。背包模式的存在,是为了补充以上几种作业方式的不足,用于测量一些汽车和飞机都进不去的地方,比如地下空间测量,矿山测量、方量计算等地方。由于人在背负设备步行时存在一定人为抖动,一般经过处理后在10cm左右。
 背包作业模式
背包作业模式
激光雷达这么多参数,我应该关注什么指标?
01角分辨率,也就是测角精度
角分辨率是扫描仪分辨目标的能力,测角分辨率越小,则表明能够分辨的目标越小,这样测量出的点云数据就越细腻。一般避障级激光传感器的测角精度只有0.1°左右,而测绘级激光传感器角分辨率一般是0.001°甚至更低。
02测量距离
测量距离与激光发射频率和实际地物反射率有关,最大测量距离和反射率有关,一般是指ρ≧60%(部分甚至到ρ≧90%)的情况下的最大扫描距离,同时测量距离与激光发射频率成反比,发射频率越大,测量距离越小不同的物体(山坡,植被,水泥建筑物,金属管道,土壤矿物,煤等)具有不同的反射率,大多数建筑物的反射率为50%左右,煤和沥青路面在20%左右,因此在实际应用中,我们要对设备的最大射程打折。
03测量速度
一般通过激光脉冲的最大发射频率来体现,例如RIEGL的VUX-1UAV其最大激光发射频率为550 000点/秒,而mini VUX-1UAV 是100 000点/秒。
04测量精度
它指测量一定数量后得出的真实值,是与真实一致性的度,重复精度也叫再现性或可重复性,是用于表示多次测量得到同一结果的可能性的量。一般测绘级的激光传感器测量精度都在1cm左右。
05视场角
视场角=激光束的扫描角,指激光束通过扫描装置所能达到的最大角度范围,而有效视场角一般还会与实际作业时的航高、有效测量距离有关。虽然很多激光传感器的水平视场角是360°的,我们实际应用时一般只会用到90°-120°。
好处说了这么多,那么激光雷达的不足在哪?
01受天气和环境的影响
美国公布了一份长达35页的《新兴科技趋势报告》。
该报告是在美国过去五年内由政府机构、咨询机构、智囊团、科研机构等发表的32份科技趋势相关研究调查报告的基础上提炼形成的。
通过对近700项科技趋势的综合比对分析,最终明确了20项最值得关注的科技发展趋势。
02贵
美国公布了一份长达35页的《新兴科技趋势报告》。
该报告是在美国过去五年内由政府机构、咨询机构、智囊团、科研机构等发表的32份科技趋势相关研究调查报告的基础上提炼形成的。
通过对近700项科技趋势的综合比对分析,最终明确了20项最值得关注的科技发展趋势。
虽然目前激光雷达还算不上完美,但由于它能够透射植被的特点,能够直接测量地表,很好地解决密林测量难题,因此受到了很多客户的青睐。未来,随着技术的进步以及量产的增加,成本过高的问题可以有效降低,目前虽然激光雷达不算完美,但它未来可期!
原文链接:https://mp.weixin.qq.com/s/SDX9asBEBjWhHOsdwI_7Rg
文案 | 马 园 排版 | 冯少华 校对 | 于 粲

 陕公网安备 61019002000969号
陕公网安备 61019002000969号


