【科普时间到】—从地转偏向力到姿态测量
发布时间: | 来源: | 【 大 中 小 】 | 【打印】 【关闭】
风,是由空气流动引起的一种自然现象。生活中我们时常会忽略由它带来的影响,而在进行羽毛球等户外活动时,风和风向带来的影响则不容忽视。
高中阶段,相信大家都曾在地理课的课堂上学习过“地转偏向力”的相关知识,其最直观的表现为:对季风环流、气团运行、气旋(台风)与反气旋(冷空气)的运移路径、洋流与河流的运动方向以及其它许多自然现象有着明显的影响,例如,北半球河流多有冲刷右岸的倾向,高纬度地区河流上浮运的木材多向右岸集中;北半球南方吹向北方的风向东偏转,北方吹向南方的风向西偏转,南半球则相反。
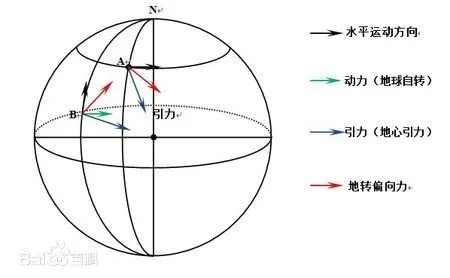
事实上,不仅是自然界受影响影响,在地转偏向力的影响下,导弹也会偏离预定的方向。在一战期间,德军用他们引以自豪的射程为113千米的大炮轰击巴黎时,懊恼地发现炮弹总是向右偏离目标。直到那时为止,他们从没担心过地转偏向力的影响,因为他们从没有这样远距离的开火。
那么,要如何以科学的方式来认识地转偏向力呢?又要如何总结规律,甚至实现定量呢?这就涉及到了地转偏向力的另一个名字——科里奥利力(也叫科氏力,哥里奥利力)。
举一个简单的例子,假设在某一个圆盘有A、B两点,圆盘中心为O,且有OA>OB,在A点以相对于圆盘的速度V沿半径方向向B点扔出一小球,在圆盘静止的情况下,经过一段时间 后,小球会到达B点;但是如果圆盘绕轴以角速度ω逆时针旋转,那么小球不会到达B点,而是会到达B转动的前方一点B’。
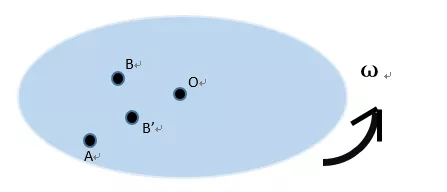
这种变化是由转动参考系带来的,在圆盘旋转时,以A、B两点为例,小球离开A点时,不仅具有径向速度 V',还有切向速度 V1,而在B点处,切向速度为V2 ,且这两点拥有不同的线速度(V1 > V2 ),因此在垂直于AB的方向上,球运动的比B点更远一些,这是导致偏移的根本原因。对于以圆盘为参考系的B,,小球不仅具有径向初速度 V' ,还在垂直于AB的方向上有向右的加速度 a',为了对这一加速度进行解释,需要在运动方程中引入一个假想的惯性力,这就是科里奥利力( a'也即科里奥利加速度)。
以转动系为参考系,小球由A到B’的时间为:
![]()
在 时间内,球偏离AB的距离:
时间内,球偏离AB的距离:

在很小的情况下,可以把BB’段的运动视为初速度为0的匀加速,即

两式联立可得 。
。

因此,只要我们通过一定方式获得a'和V'的值,就能够计算得出角速度ω。
当一个物体做周期运动(振荡或旋转)时,在其正交平面内旋转物体,就会在与物体周期运动相垂直的方向上产生科里奥利力,也即在与物体周期运动相垂直的方向上也运动。因此在可以设置这样一个质量块,使之做频率振幅都可控的振荡,则可以计算出径向速度V',再测量得出实际的加速度a',就能够得出转速ω。
在三维姿态测量(偏摆角、俯仰角和滚转角)中,俯仰角和偏摆角,采用常规光电测量方法即可获取,有较为成熟的测量方法;但滚转角则一直是精密测量领域内的难点,在精密制造业、航空、航天、精确制导和武器装备等多个领域,都对此展开研究,并不断探索高精度的测量方法。利用科里奥利效应的陀螺仪,就是常用的滚转角测量部件。
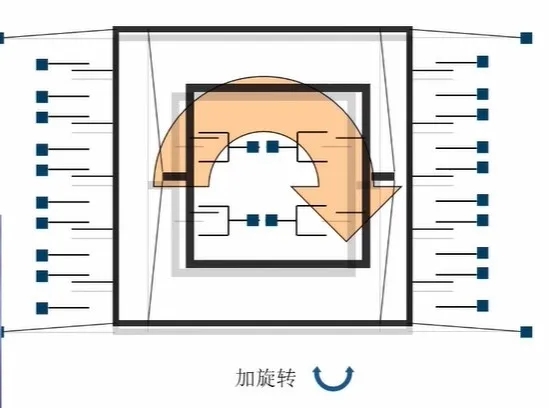
陀螺仪主要分为两大类:(1)以经典力学为基础的陀螺仪;如机械式陀螺仪、振动式陀螺仪、基于MEMS加工工艺的微机械陀螺仪等;(2)以现代物理学为基础的光学陀螺仪,包括激光陀螺仪和光纤陀螺仪等。机械式陀螺仪主要用于平台式导航系统,体积一般较大,不适用于小型无人机的姿态测量和控制;光学陀螺仪精度高,但价格极高,只适合于军用。而MEMS陀螺仪因其体积小、造价低而广泛应用于多种场合。(下图为MEMS陀螺仪的结构示意图。)
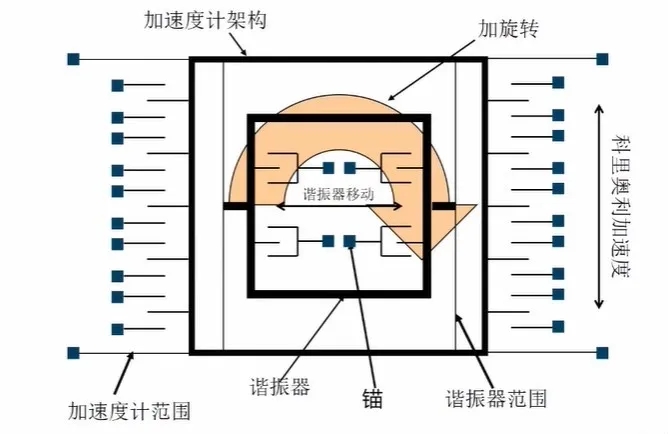
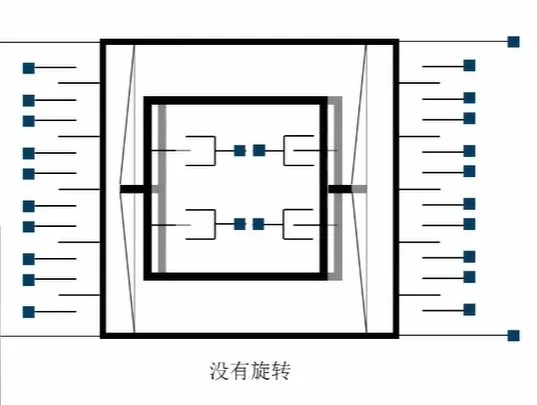
不旋转时,内部结构框架随质量块高频振动,而外部结构框架不移动。旋转过程中,受科里奥利力的影响,垂直方向上也产生了运动,外部框架随之移动,因此引起了电容的变化,检测电容变化,即可获得加速度(如图示为MEMS陀螺仪的工作原理)。
测量中,可将MEMS陀螺仪固接在载体上,获取输出并进行数据处理,通过求解姿态矩阵的微分方程,最终可以获得载体坐标系相对于地理坐标系的角速率信号。实际应用中,则常常将陀螺仪与加速度计结合起来,以获得更高的测量精度。
参考文献
[1]冯智勇, 曾瀚, 张力, et al. 基于陀螺仪及加速度计信号融合的 姿态角度测量[J]. 西南师范大学学报(自然科学版), 2011(04):143-147.
[2]张秋阳. 无人机姿态测算及其误差补偿研究[D]. 中南大学, 2011.
[3]韩艳. 制导炮弹飞行姿态的陀螺/磁阻传感器组合测量方法研究[D]. 南京理工大学, 2010.
[4]王可宁, 张雄星, 田建平. 双加计与MEMS速率陀螺仪融合的滚转角测量算法%A Rolling Angle Measurement Algorithm Based on Fusion of Two-Axis Accelerometer and MEMS Gyroscope[J]. 西安工业大学学报, 036(9):726-729,748.

 陕公网安备 61019002000969号
陕公网安备 61019002000969号


