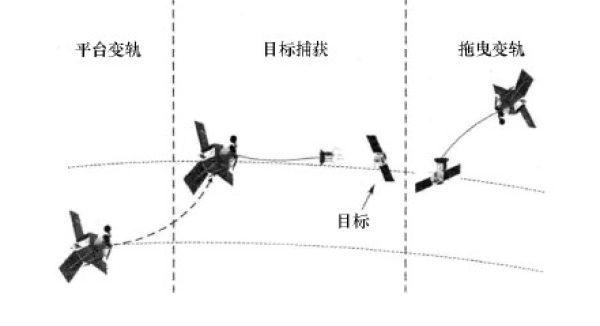
2022年1月6日早上6点59分,天和核心舱的机械臂成功捕获了天舟二号货运飞船,拖动数吨重的天舟二号进行平面转位,重新与空间站完成对接。这是我国首次利用空间站机械臂操作大型在轨飞行器进行转位试验,验证了空间站舱段转位技术和机械臂大负载操控技术。一时间,这个航天器上的神奇结构彻底出圈。
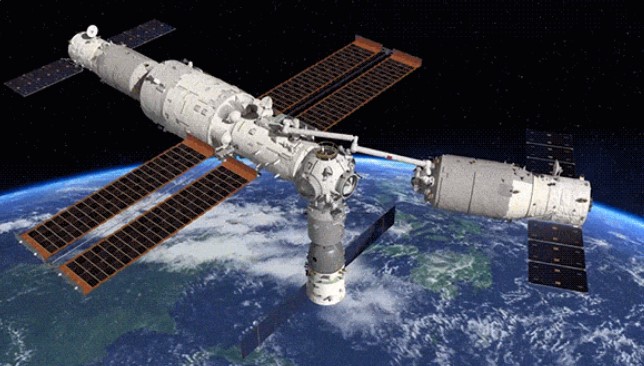
机械臂操作在轨飞行器转位
什么是空间机械臂?顾名思义,就是指空间站上类似于人类手臂式的航天装备,能辅助宇航员完成各类任务的有效载荷,是集机械、视觉、动力学、电子和控制等学科为一体的高端航天装备。天和核心舱是我国首个七自由度的机械臂,是对人类手臂最真实的还原,工作状态最长可达18m,直径近4m,是目前同类航天产品中复杂度最高、规模最大、控制精度最高的空间智能机械系统,主要承担舱段转位、航天员出舱活动、舱外货物搬运、舱外状态检查、舱外大型设备维护八大任务。
其实这已经不是“天和”核心舱机械臂第一次备受关注了。在美国喜剧《太空部队》中,我国巨大的空间站在掠过美国卫星时,通过机械臂剪除美制卫星的太阳能翼帆板,导致卫星失去能源彻底失效。这种酷炫的技术只能存在于科幻作品中吗?从技术层面讲其实不难实现,这就涉及到“空间目标捕获”技术。

《太空部队》剧照
空间目标捕获是指通过航天器的捕获机构来控制另一个航天器的技术,目前世界各航天强国都有相关研究,主要用与航天器在轨组装、维修、燃料加注,太空垃圾清理等。
空间目标捕获技术按照捕获方式可分为接触式捕获和非接触式捕获,接触式捕获又可分为刚性连接捕获和柔性连接捕获。
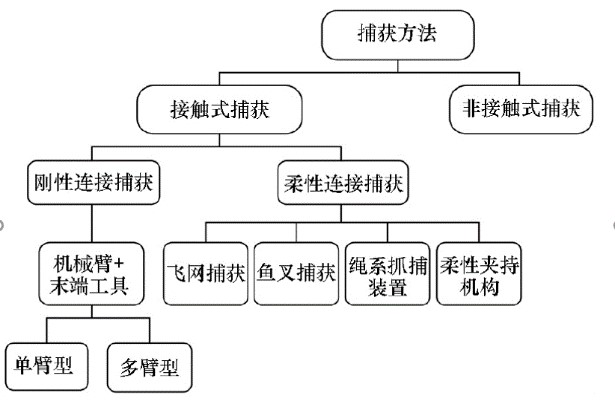
空间目标捕获技术分类
(1)非接触式捕获
非接触式捕获通过发射激光或离子束等方式产生作用力,推动目标进入预期位置。
(2)接触式捕获
1)伸缩杆捕获方案
捕获机构靠近卫星发动机喷嘴,捕获机构沿发动机喷嘴轴线方向伸展,捕获装置送入目标卫星内部。随后,可膨胀结构展开并实现与目标星的连接。
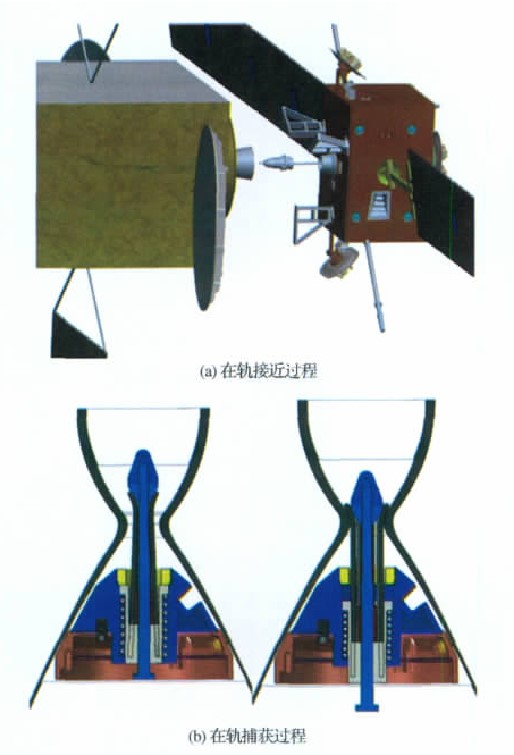
捕获机构接近、捕获过程
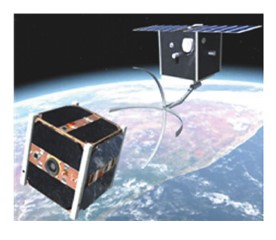
2)机械臂捕获方案
捕获机构通过视觉感知技术获得目标卫星的运动特性,在机械臂接近目标卫星时,利用目标卫星的星箭连接接口(如适配器对接环及其螺栓孔)进行捕获。
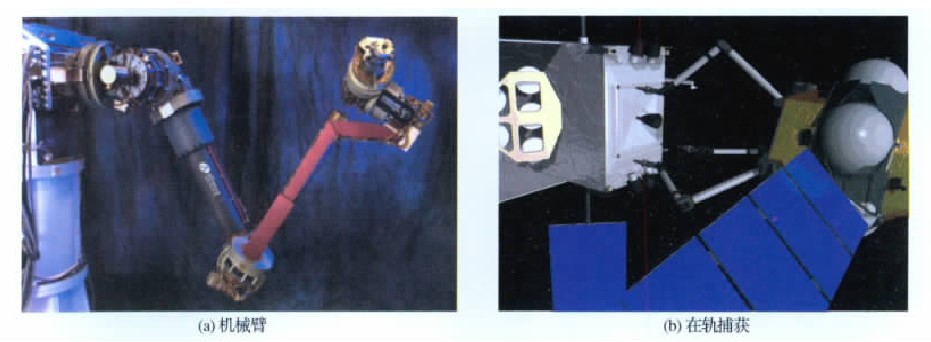
空间机械臂(左)及在轨捕获过程
3) 飞爪或飞网捕获方案
飞网通常采用四边形结构,四角上配有质量块。飞网发射后在质量块作用下张开;,接触目标之后,在惯性力作用下,质量块交错,将目标包裹,实现捕获。
飞网捕获过程
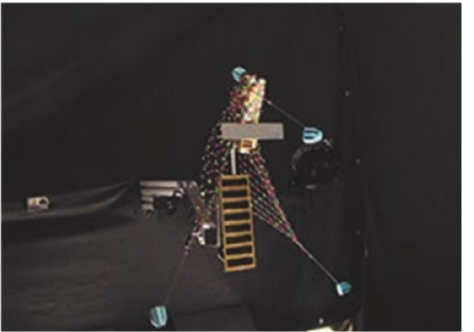
4) 绳索抓捕机构
通过空间绳系机器人对目标卫星进行捕获和远程操作。
绳索抓捕示意图
5)柔性夹持机构
利用一些材料的特性,如仿壁虎脚的微纳米黏附和介电弹性体材料等,实现对目标柔性捕获。
柔性捕获概念图
随着空间探索的深入,空间目标捕获技术愈显重要,广泛应用于载人航天、深空探测以及空间攻防等领域。世界各航天大国都在积极开展和参与航天器捕获技术的研究。美国一直是空间目标捕获技术的佼佼者,欧空局、俄罗斯以及日本在该领域也都有大量研究。我国从上世纪90年代起开展相关的研究工作。2013 年我国成功在轨演示了自由飞行空间机器人在轨捕获卫星的实验,使我国成为继日本、美国之后,第三个能自主进行在轨捕获卫星的国家,其中漂浮卫星的自主捕获技术处于国际领先水平。
这篇科普的撰写恰逢第七个“中国航天日”。从东方红卫星播放的《东方红》到天和核心舱的机械臂。我国的航天事业从无到有,从有到强,破除欧美航天强国技术垄断,大踏步追赶甚至反超。这是我国几代航天人用青春、热血乃至生命谱写的壮丽篇章,感慨之情,无以言表。作为新一代航天人,我们要铭记历史,传承精神,以更加饱满的状态投入到工作学习中去。航天事业的接力棒已在我们手中,接力棒上镌刻的近70年航天人的追梦画卷,航天人当争相向前,在浩瀚宇宙中不断刷新“中国高度”!

 陕公网安备 61019002000969号
陕公网安备 61019002000969号


