相信机械工程专业的学生和对机械感兴趣的读者们都知道什么是机构——机构是一种可以传递或转换运动、力或能量的装置。在机械领域上百年的发展历程中,刚性(rigid)机构因其设计加工简单、运动可靠、易于分析等优点得到无数工程师的青睐,比如传统的齿轮传动(图 1)、凸轮传动(图 2)、滚珠丝杠传动等等。

(a)用于汽车差速器的齿轮传动(b)用于发动机活塞杆的凸轮传动(c)将旋转运动转换为平移运动的滚珠丝杠
图 1.几种刚性传动机构
不知道学过材料力学的同学们还记不记得,在学习的过程中老师一般会过多的强调材料的刚度和强度,甚至在设计机构时总是需要计算杆或者梁的强度或刚度是否满足设计要求,也就是计算其够不够“强和硬”。而我们今天即将讨论的这种机构可以看作以前学习的一种特例,因为它不需要有那么大的刚度,反而需要较小的刚度。
顾名思义,柔顺(compliant)机构也是一种机构,也可以传递或转换力、运动或能量,但与传统刚性机构不同的是,柔顺机构是依靠其自身的弹性变形来工作 的。我们生活中经常会用到使用柔顺机构的东西,比如发卡。它在夹头发的时候是一种稳态,在打开的时候又是一种稳态,这两种稳态的转换就是使用了柔顺机构的原理,因为它利用了弹性变形来工作,试想,如果发卡足够“强和硬”导致我们掰不动,那还怎么使用它呢?
图 2.生活中常见的柔顺机构——发卡柔顺机构有很多的优点。
首先它可以整体化或一体化设计和加工,故易于轻量化、微(小)型化,免于装配,降低成本,减少零件数目,提高可靠性等等。柔顺机构没有摩擦和间隙,可以实现高精度运动,又可以减小噪声,提高寿命。在恶劣的工作环境下,柔顺机构可以抵抗冲击和振动,避免损坏设备。总之,柔顺机构有着很多传统刚性机构没有的优点。
说到这里可能有小伙伴心里提问了,柔顺机构既然这么好使,为什么它看起来没有在科研项目上广泛使用呢?其实,柔顺机构的优势人们很早就发现了,但是分析和设计柔顺机构过于困难,受于当时计算水平的限制,柔顺机构没有得到人们的重视。近几十年来,随着计算机水平的飞速发展,一大批用于计算机仿真软件的出现给柔顺机构的设计和分析带来了解决方法,柔顺机构终于迎来了发展的机会。
如今对柔顺机构进行建模和分析的方法有很多种,主流的方法有伪刚体模型法、拓扑优化设计法、模块化法、结构矩阵法和约束设计法等等,其中伪刚体模型法的原理较为简单,容易理解。这里以一个柔顺梁为例,简单介绍一下伪刚体模型法的原理,感兴趣的小伙伴可以自行了解一下其他方法。伪刚体模型法将柔顺机构转化为传统的刚性机构,如下图[1]所示:
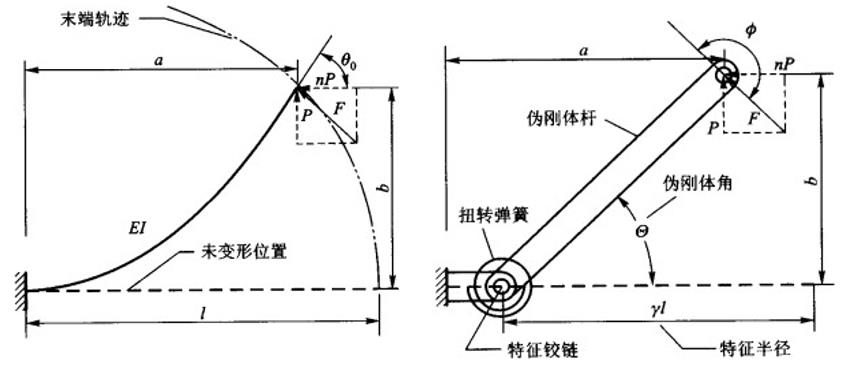
图 3.伪刚体模型法原理图。
左图是柔顺梁的变形图,右图是对应的伪刚体模型 伪刚体模型法使用特征铰链来模拟柔顺梁的变形程度,使用扭转弹簧的扭簧系数
来模拟柔顺梁的刚度。根据柔顺梁末端受力的方向和大小,使用已有的公式即可算出伪刚体模型的特征半径和伪刚体角,进而计算出扭簧系数。不难理解,伪刚体模型法的分析精度较低,只适用于大变形和低精度的场合。
目前,柔顺机构在精密仪器、仿生机器人、柔顺智能机构[2]等诸多领域获得了广
泛的应用。笔者在这里给大家介绍一下柔顺机构在航天领域的应用。随着遥感技术的不断发展,人类对空间探测精度的要求也越来越高。一方面,根据瑞利判据,增大空间望远镜的通光口径可以提高空间探测精度,而由于火箭整流罩尺寸和加工制造等因素的限制,空间望远镜的单体式主镜不能无限的扩大,所以科学家们将望远镜的主镜做成分块的形式,主镜由很多子镜组成,且为了减小体积,望远镜的主镜被设计成可折叠的形式。也就是说,一些子镜可以进行折叠和展开。由于空间望远镜工作环境的变化(从地面到太空),望远镜子镜的位置姿态会发生改变,进而影响望远镜的成像精度。因此,可展开望远镜子镜位置姿态的调节就成为保证望远镜成像精度的关键技术。
国内外针对可展开望远镜子镜位置姿态调节的研究有很多,在这些研究中,柔顺机构以其容易获得高精度、可减少零部件数目、可靠性高等优点得到了很多科研工作者们的青睐,并获得了广泛的应用。柔顺机构在调节子镜位置姿态的过程中扮演着输出精细位移的角色,该精细位移可达微米级甚至纳米级。下面以去年年底发射上天的詹姆斯 韦伯空间望远镜为例,介绍柔顺机构在航天方面的一个应用。詹姆斯 韦伯空间望远镜的主镜由 18 块子镜组成,如图 4 所示。这些子镜在从地球到太空的过程中和展开、折叠的运动过程中会发生位置姿态的变化,因此需要调节机构去调节每个子镜的位置姿态,使之尽可能接近原始位置。图 5 是用于调节詹姆斯 韦伯空间望远镜子镜位置姿态的促动器中的柔顺机构,该柔顺机构的中部横梁是输入端,在电机的作用下进行正弦运动,顶端是输出端,调节精度可达 2.2nm,如此高的调节精度可以保证望远镜的成像质量。
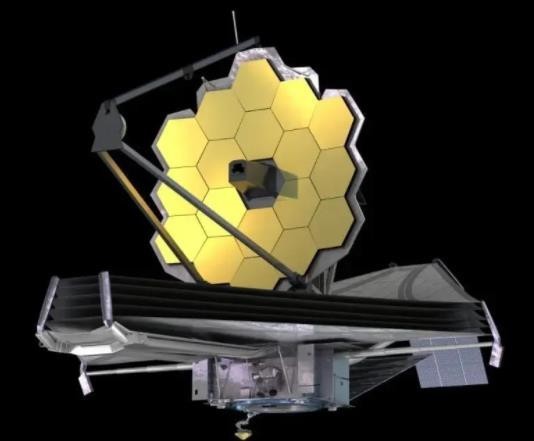
图 4.詹姆斯 韦伯空间望远镜
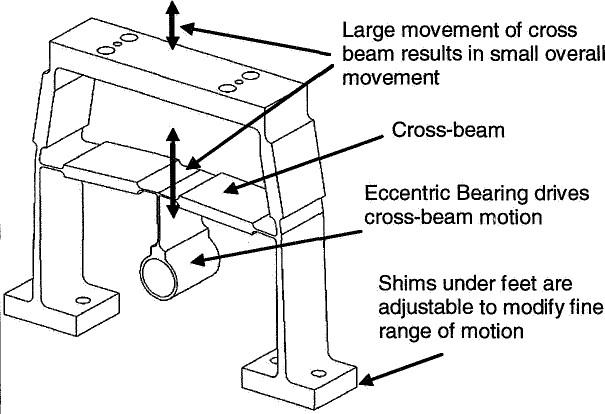
图 5.詹姆斯 韦伯子镜促动器
柔顺机构已发展 30 余年,正处于飞速发展的时期。伴随着计算机技术的发展,一大批分析柔顺机构的理论和方法正如雨后春笋般涌出。因容易实现高精度、结构简单、可靠性高等优点,柔顺机构的应用也渗透到了诸多领域。如今,柔顺机构不仅在航天领域获得了成熟的应用,在医疗器械、柔体机器人、光刻机领域的应用也越来越广。未来的几十年中,柔顺机构必将为我国的超精密领域、智能和仿生机器人领域等发挥不可替代的作用,成为许多“大国重器”中的关键部件。
看到这里,不知是否有读者开始对柔顺机构感兴趣了呢?笔者想说的是,想要深入了解甚至研究柔顺机构,就要学习一些基础的和相关的知识,从而具备学习柔顺机构的能力。在这里,笔者为大家介绍学习柔顺机构之前需要具备的一些专业知识。要学习的基础知识有高等数学、线性代数等(另外也推荐大家学习英语,毕竟做研究是少不了读国外文献的);专业基础知识有机械设计基础、材料力学、理论力学、机械制造技术基础等;另外还需要懂一些关于热力学、机械振动等方面的知识;最后需要学习的是参考文献中的两本书——《Compliant Mechanisms》(中文版:柔顺机构学)和《柔性设计 柔性机构的分析与综合》。
结语:当你走入机械工程、走入柔顺机构,你会发现不一样的天地、会发现世界上竟还有如此精巧灵敏的机构可以实现如此复杂的运动。在研究柔顺机构的过程中,你会沉浸其中并找到自身的价值,也会感受到那份为国出力的使命感和自豪感。
参考文献:
[1][美]Larry L.Howell. Compliant Mechanisms[M].余跃庆.北京:高等教育出版社,2007:3-6.
[2]于靖军,毕树生,裴旭,赵宏哲,宗光华.柔性设计——柔性机构的分析与综合 [M].北京:高等教育出版社,2018:7-28.


 陕公网安备 61019002000969号
陕公网安备 61019002000969号


